Pick Skill
The Pick skill performs a standard pick operation with grasp pose selection. It loads pre-annotated grasp poses from .npy files, filters them based on orientation constraints, and executes the pick motion.
Code Example:
# Source workflows/simbox/core/skills/pick.py
import os
import random
from copy import deepcopy
import numpy as np
from core.skills.base_skill import BaseSkill, register_skill
from core.utils.constants import CUROBO_BATCH_SIZE
from core.utils.plan_utils import (
select_index_by_priority_dual,
select_index_by_priority_single,
)
from core.utils.transformation_utils import poses_from_tf_matrices
from omegaconf import DictConfig
from omni.isaac.core.controllers import BaseController
from omni.isaac.core.robots.robot import Robot
from omni.isaac.core.tasks import BaseTask
from omni.isaac.core.utils.prims import get_prim_at_path
from omni.isaac.core.utils.transformations import (
get_relative_transform,
tf_matrix_from_pose,
)
@register_skill
class Pick(BaseSkill):
def __init__(self, robot: Robot, controller: BaseController, task: BaseTask, cfg: DictConfig, *args, **kwargs):
super().__init__()
self.robot = robot
self.controller = controller
self.task = task
self.skill_cfg = cfg
object_name = self.skill_cfg["objects"][0]
self.pick_obj = task.objects[object_name]
# Get grasp annotation
usd_path = [obj["path"] for obj in task.cfg["objects"] if obj["name"] == object_name][0]
usd_path = os.path.join(self.task.asset_root, usd_path)
grasp_pose_path = usd_path.replace(
"Aligned_obj.usd", self.skill_cfg.get("npy_name", "Aligned_grasp_sparse.npy")
)
sparse_grasp_poses = np.load(grasp_pose_path)
lr_arm = "right" if "right" in self.controller.robot_file else "left"
self.T_obj_ee, self.scores = self.robot.pose_post_process_fn(
sparse_grasp_poses,
lr_arm=lr_arm,
grasp_scale=self.skill_cfg.get("grasp_scale", 1),
tcp_offset=self.skill_cfg.get("tcp_offset", self.robot.tcp_offset),
constraints=self.skill_cfg.get("constraints", None),
)
# Keyposes should be generated after previous skill is done
self.manip_list = []
self.pickcontact_view = task.pickcontact_views[robot.name][lr_arm][object_name]
self.process_valid = True
self.obj_init_trans = deepcopy(self.pick_obj.get_local_pose()[0])
final_gripper_state = self.skill_cfg.get("final_gripper_state", -1)
if final_gripper_state == 1:
self.gripper_cmd = "open_gripper"
elif final_gripper_state == -1:
self.gripper_cmd = "close_gripper"
else:
raise ValueError(f"final_gripper_state must be 1 or -1, got {final_gripper_state}")
self.fixed_orientation = self.skill_cfg.get("fixed_orientation", None)
if self.fixed_orientation is not None:
self.fixed_orientation = np.array(self.fixed_orientation)
def simple_generate_manip_cmds(self):
manip_list = []
# Update
p_base_ee_cur, q_base_ee_cur = self.controller.get_ee_pose()
cmd = (p_base_ee_cur, q_base_ee_cur, "update_pose_cost_metric", {"hold_vec_weight": None})
manip_list.append(cmd)
ignore_substring = deepcopy(self.controller.ignore_substring + self.skill_cfg.get("ignore_substring", []))
ignore_substring.append(self.pick_obj.name)
cmd = (
p_base_ee_cur,
q_base_ee_cur,
"update_specific",
{"ignore_substring": ignore_substring, "reference_prim_path": self.controller.reference_prim_path},
)
manip_list.append(cmd)
# Pre grasp
T_base_ee_grasps = self.sample_ee_pose() # (N, 4, 4)
T_base_ee_pregrasps = deepcopy(T_base_ee_grasps)
self.controller.update_specific(
ignore_substring=ignore_substring, reference_prim_path=self.controller.reference_prim_path
)
if "r5a" in self.controller.robot_file:
T_base_ee_pregrasps[:, :3, 3] -= T_base_ee_pregrasps[:, :3, 0] * self.skill_cfg.get("pre_grasp_offset", 0.1)
else:
T_base_ee_pregrasps[:, :3, 3] -= T_base_ee_pregrasps[:, :3, 2] * self.skill_cfg.get("pre_grasp_offset", 0.1)
p_base_ee_pregrasps, q_base_ee_pregrasps = poses_from_tf_matrices(T_base_ee_pregrasps)
p_base_ee_grasps, q_base_ee_grasps = poses_from_tf_matrices(T_base_ee_grasps)
if self.controller.use_batch:
# Check if the input arrays are exactly the same
if np.array_equal(p_base_ee_pregrasps, p_base_ee_grasps) and np.array_equal(
q_base_ee_pregrasps, q_base_ee_grasps
):
# Inputs are identical, compute only once to avoid redundant computation
result = self.controller.test_batch_forward(p_base_ee_grasps, q_base_ee_grasps)
index = select_index_by_priority_single(result)
else:
# Inputs are different, compute separately
pre_result = self.controller.test_batch_forward(p_base_ee_pregrasps, q_base_ee_pregrasps)
result = self.controller.test_batch_forward(p_base_ee_grasps, q_base_ee_grasps)
index = select_index_by_priority_dual(pre_result, result)
else:
for index in range(T_base_ee_grasps.shape[0]):
p_base_ee_pregrasp, q_base_ee_pregrasp = p_base_ee_pregrasps[index], q_base_ee_pregrasps[index]
p_base_ee_grasp, q_base_ee_grasp = p_base_ee_grasps[index], q_base_ee_grasps[index]
test_mode = self.skill_cfg.get("test_mode", "forward")
if test_mode == "forward":
result_pre = self.controller.test_single_forward(p_base_ee_pregrasp, q_base_ee_pregrasp)
elif test_mode == "ik":
result_pre = self.controller.test_single_ik(p_base_ee_pregrasp, q_base_ee_pregrasp)
else:
raise NotImplementedError
if self.skill_cfg.get("pre_grasp_offset", 0.1) > 0:
if test_mode == "forward":
result = self.controller.test_single_forward(p_base_ee_grasp, q_base_ee_grasp)
elif test_mode == "ik":
result = self.controller.test_single_ik(p_base_ee_grasp, q_base_ee_grasp)
else:
raise NotImplementedError
if result == 1 and result_pre == 1:
print("pick plan success")
break
else:
if result_pre == 1:
print("pick plan success")
break
if self.fixed_orientation is not None:
q_base_ee_pregrasps[index] = self.fixed_orientation
q_base_ee_grasps[index] = self.fixed_orientation
# Pre-grasp
cmd = (p_base_ee_pregrasps[index], q_base_ee_pregrasps[index], "open_gripper", {})
manip_list.append(cmd)
if self.skill_cfg.get("pre_grasp_hold_vec_weight", None) is not None:
cmd = (
p_base_ee_pregrasps[index],
q_base_ee_pregrasps[index],
"update_pose_cost_metric",
{"hold_vec_weight": self.skill_cfg.get("pre_grasp_hold_vec_weight", None)},
)
manip_list.append(cmd)
# Grasp
cmd = (p_base_ee_grasps[index], q_base_ee_grasps[index], "open_gripper", {})
manip_list.append(cmd)
cmd = (p_base_ee_grasps[index], q_base_ee_grasps[index], self.gripper_cmd, {})
manip_list.extend(
[cmd] * self.skill_cfg.get("gripper_change_steps", 40)
) # Default we use 40 steps to make sure the gripper is fully closed
ignore_substring = deepcopy(self.controller.ignore_substring + self.skill_cfg.get("ignore_substring", []))
cmd = (
p_base_ee_grasps[index],
q_base_ee_grasps[index],
"update_specific",
{"ignore_substring": ignore_substring, "reference_prim_path": self.controller.reference_prim_path},
)
manip_list.append(cmd)
cmd = (
p_base_ee_grasps[index],
q_base_ee_grasps[index],
"attach_obj",
{"obj_prim_path": self.pick_obj.mesh_prim_path},
)
manip_list.append(cmd)
# Post-grasp
post_grasp_offset = np.random.uniform(
self.skill_cfg.get("post_grasp_offset_min", 0.05), self.skill_cfg.get("post_grasp_offset_max", 0.05)
)
if post_grasp_offset:
p_base_ee_postgrasps = deepcopy(p_base_ee_grasps)
p_base_ee_postgrasps[index][2] += post_grasp_offset
cmd = (p_base_ee_postgrasps[index], q_base_ee_grasps[index], self.gripper_cmd, {})
manip_list.append(cmd)
# Whether return to pre-grasp
if self.skill_cfg.get("return_to_pregrasp", False):
cmd = (p_base_ee_pregrasps[index], q_base_ee_pregrasps[index], self.gripper_cmd, {})
manip_list.append(cmd)
self.manip_list = manip_list
def sample_ee_pose(self, max_length=CUROBO_BATCH_SIZE):
T_base_ee = self.get_ee_poses("armbase")
num_pose = T_base_ee.shape[0]
flags = {
"x": np.ones(num_pose, dtype=bool),
"y": np.ones(num_pose, dtype=bool),
"z": np.ones(num_pose, dtype=bool),
"direction_to_obj": np.ones(num_pose, dtype=bool),
}
filter_conditions = {
"x": {
"forward": (0, 0, 1), # (row, col, direction)
"backward": (0, 0, -1),
"upward": (2, 0, 1),
"downward": (2, 0, -1),
},
"y": {"forward": (0, 1, 1), "backward": (0, 1, -1), "downward": (2, 1, -1), "upward": (2, 1, 1)},
"z": {"forward": (0, 2, 1), "backward": (0, 2, -1), "downward": (2, 2, -1), "upward": (2, 2, 1)},
}
for axis in ["x", "y", "z"]:
filter_list = self.skill_cfg.get(f"filter_{axis}_dir", None)
if filter_list is not None:
# direction, value = filter_list
direction = filter_list[0]
row, col, sign = filter_conditions[axis][direction]
if len(filter_list) == 2:
value = filter_list[1]
cos_val = np.cos(np.deg2rad(value))
flags[axis] = T_base_ee[:, row, col] >= cos_val if sign > 0 else T_base_ee[:, row, col] <= cos_val
elif len(filter_list) == 3:
value1, value2 = filter_list[1:]
cos_val1 = np.cos(np.deg2rad(value1))
cos_val2 = np.cos(np.deg2rad(value2))
if sign > 0:
flags[axis] = np.logical_and(
T_base_ee[:, row, col] >= cos_val1, T_base_ee[:, row, col] <= cos_val2
)
else:
flags[axis] = np.logical_and(
T_base_ee[:, row, col] <= cos_val1, T_base_ee[:, row, col] >= cos_val2
)
if self.skill_cfg.get("direction_to_obj", None) is not None:
direction_to_obj = self.skill_cfg["direction_to_obj"]
T_world_obj = tf_matrix_from_pose(*self.pick_obj.get_local_pose())
T_base_world = get_relative_transform(
get_prim_at_path(self.task.root_prim_path), get_prim_at_path(self.controller.reference_prim_path)
)
T_base_obj = T_base_world @ T_world_obj
if direction_to_obj == "right":
flags["direction_to_obj"] = T_base_ee[:, 1, 3] <= T_base_obj[1, 3]
elif direction_to_obj == "left":
flags["direction_to_obj"] = T_base_ee[:, 1, 3] > T_base_obj[1, 3]
else:
raise NotImplementedError
combined_flag = np.logical_and.reduce(list(flags.values()))
if sum(combined_flag) == 0:
# idx_list = [i for i in range(max_length)]
idx_list = list(range(max_length))
else:
tmp_scores = self.scores[combined_flag]
tmp_idxs = np.arange(num_pose)[combined_flag]
combined = list(zip(tmp_scores, tmp_idxs))
combined.sort()
idx_list = [idx for (score, idx) in combined[:max_length]]
score_list = self.scores[idx_list]
weights = 1.0 / (score_list + 1e-8)
weights = weights / weights.sum()
sampled_idx = random.choices(idx_list, weights=weights, k=max_length)
sampled_scores = self.scores[sampled_idx]
# Sort indices by their scores (ascending)
sorted_pairs = sorted(zip(sampled_scores, sampled_idx))
idx_list = [idx for _, idx in sorted_pairs]
print(self.scores[idx_list])
# print((T_base_ee[idx_list])[:, 0, 1])
return T_base_ee[idx_list]
def get_ee_poses(self, frame: str = "world"):
# get grasp poses at specific frame
if frame not in ["world", "body", "armbase"]:
raise ValueError(
f"poses in {frame} frame is not supported: accepted values are [world, body, armbase] only"
)
if frame == "body":
return self.T_obj_ee
T_world_obj = tf_matrix_from_pose(*self.pick_obj.get_local_pose())
T_world_ee = T_world_obj[None] @ self.T_obj_ee
if frame == "world":
return T_world_ee
if frame == "armbase": # arm base frame
T_world_base = get_relative_transform(
get_prim_at_path(self.controller.reference_prim_path), get_prim_at_path(self.task.root_prim_path)
)
T_base_world = np.linalg.inv(T_world_base)
T_base_ee = T_base_world[None] @ T_world_ee
return T_base_ee
def get_contact(self, contact_threshold=0.0):
contact = np.abs(self.pickcontact_view.get_contact_force_matrix()).squeeze()
contact = np.sum(contact, axis=-1)
indices = np.where(contact > contact_threshold)[0]
return contact, indices
def is_feasible(self, th=5):
return self.controller.num_plan_failed <= th
def is_subtask_done(self, t_eps=1e-3, o_eps=5e-3):
assert len(self.manip_list) != 0
p_base_ee_cur, q_base_ee_cur = self.controller.get_ee_pose()
p_base_ee, q_base_ee, *_ = self.manip_list[0]
diff_trans = np.linalg.norm(p_base_ee_cur - p_base_ee)
diff_ori = 2 * np.arccos(min(abs(np.dot(q_base_ee_cur, q_base_ee)), 1.0))
pose_flag = np.logical_and(
diff_trans < t_eps,
diff_ori < o_eps,
)
self.plan_flag = self.controller.num_last_cmd > 10
return np.logical_or(pose_flag, self.plan_flag)
def is_done(self):
if len(self.manip_list) == 0:
return True
if self.is_subtask_done(t_eps=self.skill_cfg.get("t_eps", 1e-3), o_eps=self.skill_cfg.get("o_eps", 5e-3)):
self.manip_list.pop(0)
return len(self.manip_list) == 0
def is_success(self):
flag = True
_, indices = self.get_contact()
if self.gripper_cmd == "close_gripper":
flag = len(indices) >= 1
if self.skill_cfg.get("process_valid", True):
self.process_valid = np.max(np.abs(self.robot.get_joints_state().velocities)) < 5 and (
np.max(np.abs(self.pick_obj.get_linear_velocity())) < 5
)
flag = flag and self.process_valid
if self.skill_cfg.get("lift_th", 0.0) > 0.0:
p_world_obj = deepcopy(self.pick_obj.get_local_pose()[0])
flag = flag and ((p_world_obj[2] - self.obj_init_trans[2]) > self.skill_cfg.get("lift_th", 0.0))
return flag__init__(self, robot, controller, task, cfg, *args, **kwargs)
Initialize the pick skill and load grasp annotations.
Parameters:
- robot (Robot): Robot instance for state queries and actions.
- controller (BaseController): Controller for motion planning.
- task (BaseTask): Task instance containing scene objects.
- cfg (DictConfig): Skill configuration from task YAML.
Key Operations:
- Extract target object name from
cfg["objects"][0] - Load sparse grasp poses from
Aligned_grasp_sparse.npy - Transform grasp poses to EE frame via
robot.pose_post_process_fn() - Initialize
manip_listfor command sequence
simple_generate_manip_cmds(self)
Generate the full pick motion sequence. This is the core method that defines the pick behavior.
Steps:
- Update planning settings — Reset cost metrics and collision settings
- Sample EE poses — Call
sample_ee_pose()to filter valid grasp candidates - Generate pre-grasp poses — Offset grasp poses along approach direction
- Test motion feasibility — Use CuRobo to check which candidates are reachable
- Build manip_list — Construct command sequence:
- Move to pre-grasp pose with open gripper
- Move to grasp pose
- Close gripper
- Attach object to gripper (physics)
- Lift object (post-grasp offset)
sample_ee_pose(self, max_length=CUROBO_BATCH_SIZE)
Filter grasp poses based on end-effector orientation constraints.
Parameters:
- max_length (int): Maximum number of poses to return.
Returns:
- np.ndarray: Filtered grasp poses as transformation matrices
(N, 4, 4).
Filtering Logic:
- Transform all candidate grasp poses to arm base frame
- Apply
filter_x_dir,filter_y_dir,filter_z_dirconstraints - Sort remaining poses by grasp quality score
- Sample top candidates weighted by inverse score
is_success(self)
Check if the pick operation succeeded.
Success Conditions:
- Contact check: Gripper is in contact with at least one object (when closing gripper)
- Motion validity: Joint velocities < 5 rad/s, object velocity < 5 m/s
- Lift check (optional): Object lifted above initial height by
lift_ththreshold
Returns:
- bool:
Trueif all conditions are satisfied.
Grasp Orientation Filtering
The pick skill uses a direction-based filtering strategy to select valid grasp poses. Instead of constructing specific poses, we filter pre-annotated grasp candidates based on the desired end-effector orientation.
Coordinate System
All arm base frames follow this convention:
- X-axis: Forward (toward the table/workspace)
- Y-axis: Right (when facing the table)
- Z-axis: Upward
Arm Base Frame Examples:
| Franka | ARX Lift-2 | Agilex Split Aloha |
|---|---|---|
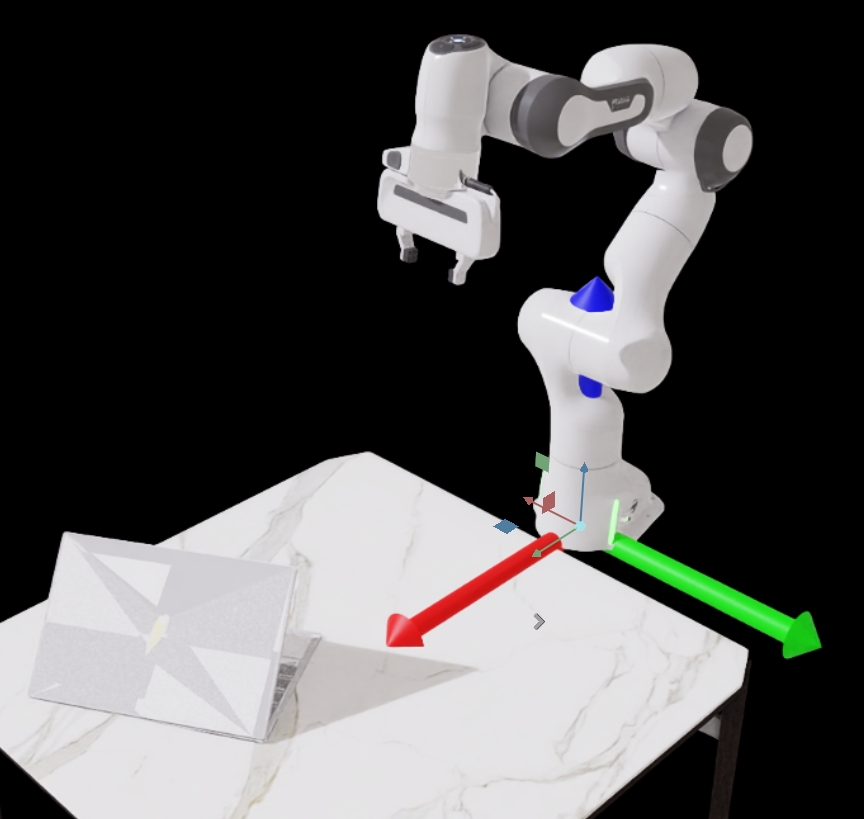 | 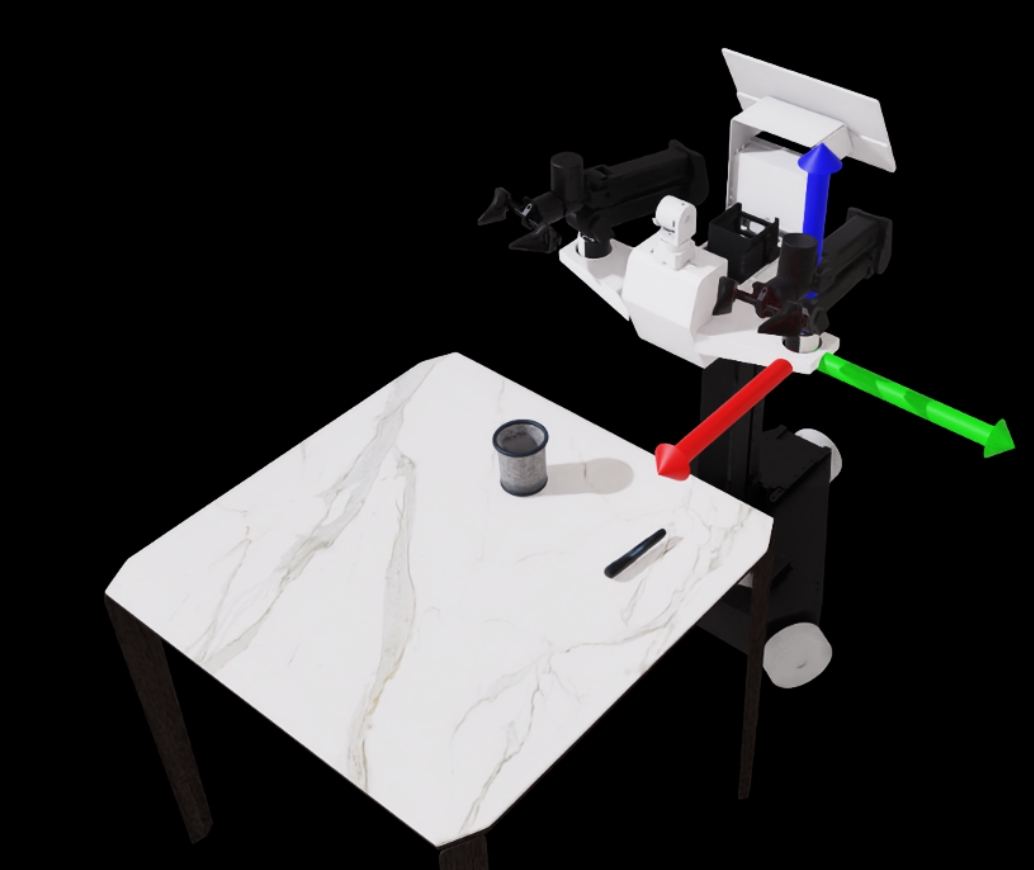 | 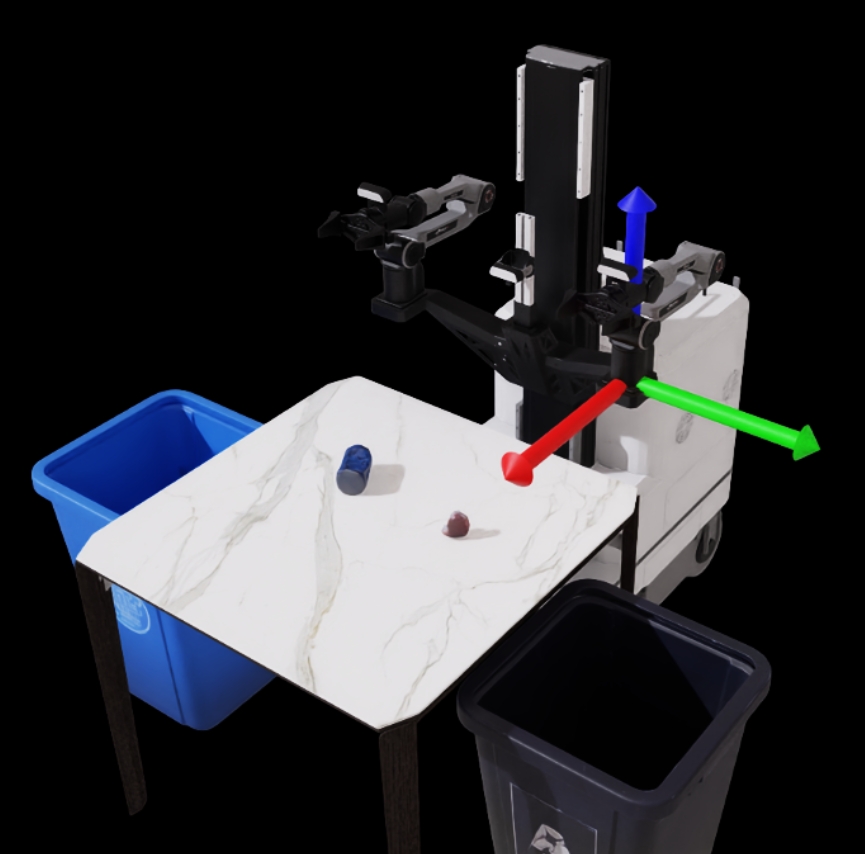 |
The end-effector frame has its own local X, Y, Z axes. The filter constraints control how these EE axes align with the arm base frame.
Filter Parameters
- filter_x_dir (list): Filter based on EE's X-axis direction in arm base frame.
- filter_y_dir (list): Filter based on EE's Y-axis direction in arm base frame.
- filter_z_dir (list): Filter based on EE's Z-axis direction in arm base frame.
Format: [direction, angle] or [direction, angle_min, angle_max]
Direction Mapping
- forward: EE axis dot arm_base_X ≥ cos(angle)
- backward: EE axis dot arm_base_X ≤ cos(angle)
- upward: EE axis dot arm_base_Z ≥ cos(angle)
- downward: EE axis dot arm_base_Z ≤ cos(angle)
Positive sign: Use ≥ cos(angle) when direction is positive (forward/upward)
Negative sign: Use ≤ cos(angle) when direction is negative (backward/downward)
Examples
Example 1: Franka Research 3
Config Example:
# Source: workflows/simbox/core/configs/tasks/pick_and_place/franka/single_pick/omniobject3d-banana.yaml
skills:
- franka:
- left:
- name: pick
objects: [pick_object_left]
filter_x_dir: ["forward", 90]
filter_z_dir: ["downward", 140]Figure Example: 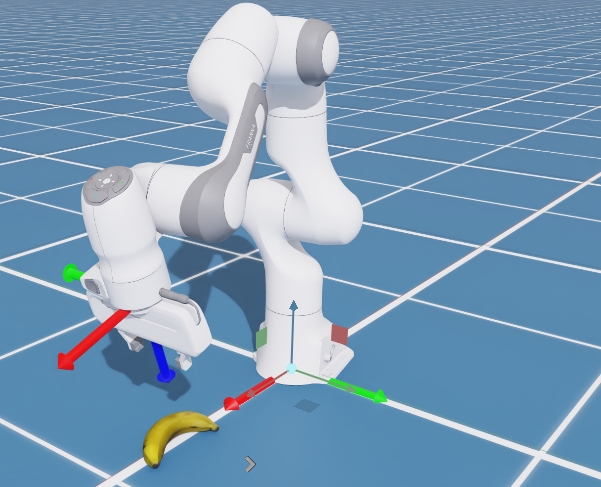
Analysis:
For Franka, the gripper's approach direction (toward fingers) is the Z-axis of the end-effector frame.
filter_z_dir: ["downward", 140]: We want the gripper to approach vertically downward. The EE's Z-axis should form an angle ≥ 140° with the arm base's Z-axis (upward). Since 140° > 90°, the EE's Z-axis points downward.filter_x_dir: ["forward", 90]: We want the gripper to face forward (no reverse grasping). The EE's X-axis should form an angle ≤ 90° with the arm base's X-axis (forward), ensuring the gripper doesn't rotate backward.
Result: Gripper approaches from above with fingers pointing down, facing forward.
Example 2: Agilex Split Aloha with Piper-100 arm
Config Example:
# Source: workflows/simbox/core/configs/tasks/pick_and_place/split_aloha/single_pick/left/omniobject3d-banana.yaml
skills:
- split_aloha:
- left:
- name: pick
objects: [pick_object_left]
filter_y_dir: ["forward", 90]
filter_z_dir: ["downward", 140]Figure Example: 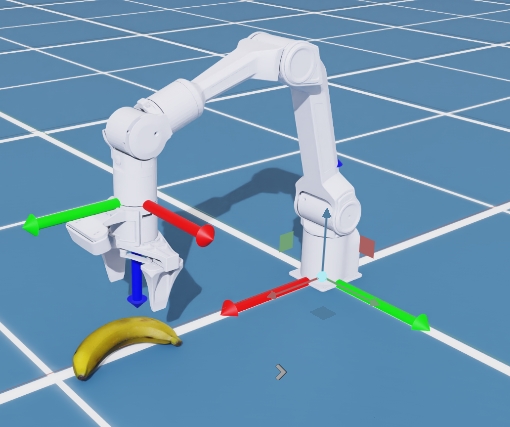
Analysis:
For Agilex Split Aloha's left arm, the gripper approach direction is still the Z-axis, but the forward-facing direction is the Y-axis.
filter_z_dir: ["downward", 140]: Same as Franka — gripper approaches vertically downward.filter_y_dir: ["forward", 90]: The EE's Y-axis should form an angle ≤ 90° with the arm base's X-axis (forward). This ensures the gripper faces forward.
Result: Same grasp orientation as Franka, but using Y-axis for forward direction control.
Example 3: ARX Lift-2 with R5a arm
Config Example:
# Source: workflows/simbox/core/configs/tasks/pick_and_place/lift2/single_pick/left/omniobject3d-banana.yaml
skills:
- lift2:
- left:
- name: pick
objects: [pick_object_left]
filter_z_dir: ["forward", 90]
filter_x_dir: ["downward", 140]Figure Example: 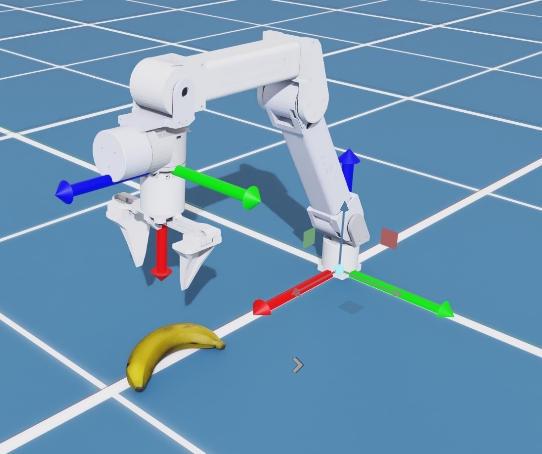
Analysis:
For Lift2 with R5A gripper, the approach direction (toward fingers) is the X-axis of the end-effector frame.
filter_x_dir: ["downward", 140]: The EE's X-axis (approach direction) should form an angle ≥ 140° with the arm base's Z-axis, meaning the gripper approaches downward.filter_z_dir: ["forward", 90]: The EE's Z-axis (gripper facing direction) should form an angle ≤ 90° with the arm base's X-axis (forward), ensuring the gripper faces forward.
Result: Gripper approaches from above, facing forward — same physical outcome as Franka, but using different axes.
Design Philosophy
Note
Filtering vs. Construction: We use a filtering strategy rather than constructing specific grasp poses. This approach:
Leverages existing annotations: Pre-computed grasp poses from
Aligned_grasp_sparse.npyalready contain valid grasp configurations.Aligns with human intuition: Specifying "gripper should approach downward and face forward" is more intuitive than computing exact rotation matrices.
Provides flexibility: Different robots with different EE frame conventions can achieve the same physical grasp by filtering different axes.
Maintains diversity: Multiple valid grasp poses remain after filtering, allowing the planner to select based on reachability and collision constraints.
Configuration Reference
- objects (list, default: required): Target object names.
- npy_name (string, default:
"Aligned_grasp_sparse.npy"): Grasp annotation file name. - grasp_scale (float, default:
1): Scale factor for grasp poses. - tcp_offset (float, default:
robot.tcp_offset): TCP offset override. - constraints (dict, default:
None): Additional grasp constraints. - final_gripper_state (int, default:
-1): Gripper state after pick:1(open) or-1(close). - fixed_orientation (list, default:
None): Fixed quaternion[w, x, y, z]if specified. - filter_x_dir (list, default:
None): EE X-axis filter:[direction, angle]. - filter_y_dir (list, default:
None): EE Y-axis filter:[direction, angle]. - filter_z_dir (list, default:
None): EE Z-axis filter:[direction, angle]. - direction_to_obj (string, default:
None): Filter by object position:"left"or"right". - pre_grasp_offset (float, default:
0.1): Distance to offset before grasp (meters). - pre_grasp_hold_vec_weight (list, default:
None): Hold vector weight at pre-grasp. - gripper_change_steps (int, default:
40): Steps to close gripper. - post_grasp_offset_min (float, default:
0.05): Minimum lift distance (meters). - post_grasp_offset_max (float, default:
0.05): Maximum lift distance (meters). - return_to_pregrasp (bool, default:
False): Return to pre-grasp pose after lift. - lift_th (float, default:
0.0): Lift threshold for success check (meters). - ignore_substring (list, default:
[]): Collision filter substrings. - test_mode (string, default:
"forward"): Motion test mode:"forward"or"ik". - t_eps (float, default:
1e-3): Translation tolerance (meters). - o_eps (float, default:
5e-3): Orientation tolerance (radians). - process_valid (bool, default:
True): Check motion validity for success.