Multi-GPU and Multi-Node#
This tutorial guides you on how to launch Vec Env on Multi-GPU and Multi-Node.
Multi-GPU#
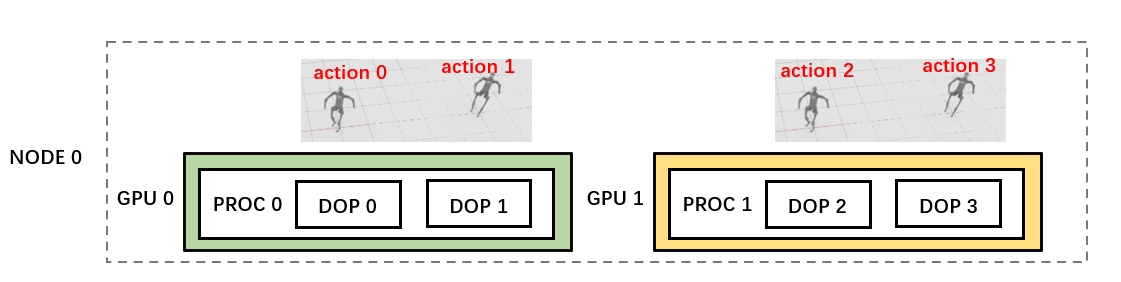
Let’s take 2 GPUs on 1 node as an example. The goal of each task (episode) in the following script is to create one h1 robot and wait it to walk from coordinates (0,0) to coordinates (1,1). Totally 8 episodes are to execute.
To run our code on 2 GPUs, call config.distribute() and pass distribution_config with proc_num set to 2 as follow:
# test.py located at /root/code
from internutopia.core.config import Config, SimConfig
from internutopia.core.vec_env import Env
from internutopia.macros import gm
from internutopia_extension import import_extensions
from internutopia_extension.configs.tasks import SingleInferenceTaskCfg
from internutopia_extension.configs.robots.h1 import (
H1RobotCfg,
move_along_path_cfg,
move_by_speed_cfg,
rotate_cfg,
)
import time
headless = True
h1 = H1RobotCfg(
position=(0.0, 0.0, 1.05),
controllers=[
move_by_speed_cfg,
move_along_path_cfg,
rotate_cfg,
],
sensors=[],
)
from internutopia.core.config.distribution import RayDistributionCfg
config = Config(
simulator=SimConfig(physics_dt=1 / 240, rendering_dt=1 / 240, use_fabric=True, headless=headless, native=headless),
env_num=2,
task_configs=[
SingleInferenceTaskCfg(
scene_asset_path=gm.ASSET_PATH + '/scenes/empty.usd',
scene_scale=(0.01, 0.01, 0.01),
robots=[h1.update()],
) for _ in range(8)
]
).distribute(
RayDistributionCfg(
proc_num=2,
gpu_num_per_proc=1, # can be omitted.
)
)
import_extensions()
def get_finish_status(obs):
if obs is None:
return True
return obs['h1']['controllers']['move_along_path']['finished']
env = Env(config)
obs,_ = env.reset()
# degree of parallelism
dop = len(obs)
action = {'h1':{'move_along_path': [[(0.0, 0.0, 0.0), (1.0, 1.0, 0.0)]]}}
no_more_episode = False
start = time.time()
while True:
obs_list, _, _, _, _ = env.step(action=[action for _ in range(dop)])
finish_status_list = [get_finish_status(obs) for obs in obs_list]
if no_more_episode and all(finish_status_list):
break
if not no_more_episode and True in finish_status_list:
env_ids = [env_id for env_id, finish_status in enumerate(finish_status_list) if finish_status]
obs, _ = env.reset(env_ids)
if None in obs:
no_more_episode = True
end = time.time()
print(f"Total time:{round(end - start)} s")
env.close()
env_num specifies the degree of parallelism in a single process. proc_num specifies the number of processes, each process will bond to A set of GPU(s). total_dop(degree of parallelism) = proc_num * env_num.
use gpu_num_per_proc (default to 1) to config the num of gpus each process bond to and ensure total_gpu >= proc_num * gpu_num_per_proc so that every process can allocate enough resources. Providing multiple GPUs for a process does not significantly accelerate simulation,So we suggest setting gpu_num_per_proc <= 1.
Each time we call the env.step method, we pass in 4 actions to control 4 robots respectively.
Multi-Node#
Let’s take 4 GPUs on 2 nodes (2 GPUs on each node) as an example. The goal of each task (episode) in the following script is to create one h1 robot and wait it to walk from coordinates (0,0) to coordinates (1,1). Totally 8 episodes are to execute. To run our code on the 4 GPUs, we need to follow the instructions on this link to start the ray cluster on two nodes:
# At Head Node
cd /root/code
conda activate internutopia
ray start --head --port=6379
# At Worker Node
cd /root/code
conda activate internutopia
ray start --address=<head-node-address:port>
Add distribution_config and call config.distribute() and pass distribution_config with params as follow:
# test.py located at /root/code
from internutopia.core.config import Config, SimConfig
from internutopia.core.vec_env import Env
from internutopia.macros import gm
from internutopia_extension import import_extensions
from internutopia_extension.configs.tasks import SingleInferenceTaskCfg
from internutopia_extension.configs.robots.h1 import (
H1RobotCfg,
move_along_path_cfg,
move_by_speed_cfg,
rotate_cfg,
)
import time
headless = True
h1 = H1RobotCfg(
position=(0.0, 0.0, 1.05),
controllers=[
move_by_speed_cfg,
move_along_path_cfg,
rotate_cfg,
],
sensors=[],
)
from internutopia.core.config.distribution import RayDistributionCfg
config = Config(
simulator=SimConfig(physics_dt=1 / 240, rendering_dt=1 / 240, use_fabric=True, headless=headless, native=headless),
env_num=2,
task_configs=[
SingleInferenceTaskCfg(
scene_asset_path=gm.ASSET_PATH + '/scenes/empty.usd',
scene_scale=(0.01, 0.01, 0.01),
robots=[h1.update()],
) for _ in range(8)
]
).distribute(
RayDistributionCfg(
proc_num=4,
gpu_num_per_proc=1, # can be omitted.
head_address="10.150.88.28", # change to the ip address of head node, can be omitted if run the script at head node.
working_dir="/root/code", # can be omitted if /root/code is shared storage or identical manually on all nodes.
)
)
import_extensions()
def get_finish_status(obs):
if obs is None:
return True
return obs['h1']['controllers']['move_along_path']['finished']
env = Env(config)
obs,_ = env.reset()
# degree of parallelism
dop = len(obs)
action = {'h1':{'move_along_path': [[(0.0, 0.0, 0.0), (1.0, 1.0, 0.0)]]}}
no_more_episode = False
start = time.time()
while True:
obs_list, _, _, _, _ = env.step(action=[action for _ in range(dop)])
finish_status_list = [get_finish_status(obs) for obs in obs_list]
if no_more_episode and all(finish_status_list):
break
if not no_more_episode and True in finish_status_list:
env_ids = [env_id for env_id, finish_status in enumerate(finish_status_list) if finish_status]
obs, _ = env.reset(env_ids)
if None in obs:
no_more_episode = True
end = time.time()
print(f"Total time:{round(end - start)} s")
env.close()
Each time we call the env.step method, we pass in 8 actions to control 8 robots respectively.

To successfully run the script on Multi-Node, the following things need to be confirmed:
The conda environment located in the same path on each node, for example:
/root/miniconda3/envs/internutopia. If not, you will encounter errors like ModuleNotFoundError: No module named ‘internutopia’.If
/root/codeis not shared storage, andtest.pywas not copied on each node manually, don’t forget to set working_dir to/root/codeso that Ray will upload the directory totmp/ray/on each node, and use it as working dir. Read this doc for more information of working_dir.Run the script on the head node for better performance,if you run the script on work node or other node out of ray, the script communicate to ray cluster through a component called “Ray Client server”, that will increase the data transmit time.
Special Note#
When using config.distribute(), several methods or properties of Env will raise NotImplementedError, please avoid using them, here is the list:
env.runner
env.simulation_app
env.get_dt()
env.finished()